Giải Chuyên đề Tin học 10 Kết nối tri thức bài 11: Dẫn đường tự động cho robot
Bài 11: Dẫn đường tự động cho robot
- Khởi động trang 49 Chuyên đề Tin 10 Kết nối
- Hoạt động 1 trang 49 Chuyên đề Tin 10 Kết nối
- Hoạt động 2 trang 50 Chuyên đề Tin 10 Kết nối
- Câu hỏi trang 52 Chuyên đề Tin 10 Kết nối
- Hoạt động 3 trang 52 Chuyên đề Tin 10 Kết nối
- Câu hỏi trang 53 Chuyên đề Tin 10 Kết nối
- Luyện tập 1 trang 53 Chuyên đề Tin 10 Kết nối
- Luyện tập 2 trang 53 Chuyên đề Tin 10 Kết nối
- Luyện tập 3 trang 53 Chuyên đề Tin 10 Kết nối
- Luyện tập 4 trang 53 Chuyên đề Tin 10 Kết nối
- Vận dụng 1 trang 53 Chuyên đề Tin 10 Kết nối
- Vận dụng 2 trang 53 Chuyên đề Tin 10 Kết nối
Giải Chuyên đề Tin học 10 bài 11: Dẫn đường tự động cho robot là tài liệu hữu ích giúp bạn đọc có thể trau dồi nội dung kiến thức, học tập tốt hơn môn Tin học lớp 10 nhé.
Khởi động trang 49 Chuyên đề Tin 10 Kết nối
Theo em làm thế nào để robot có thể tự di chuyển đúng đường đi đã vạch sẵn?
Lời giải:
Robot có thể sử dụng cảm biến dò đường để tự tìm đường đi.
Hoạt động 1 trang 49 Chuyên đề Tin 10 Kết nối
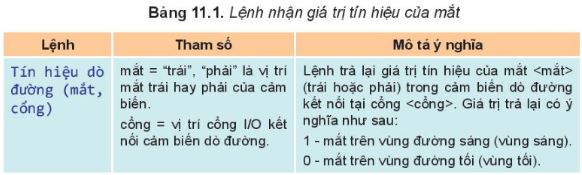
Xác định tín hiệu của mắt trong cảm biến dò đường.
Đọc, thảo luận về nguyên tắc hoạt động và câu lệnh xác định tín hiệu của mắt trong cảm biến dò đường.
Lời giải:
Cảm biến dò đường là loại cảm biến cho phép phát hiện bề mặt phản xạ hay bề mặt hấp thụ ánh sáng ở khoảng cách gần.
Khi ở trong vùng màu tối giá trị logic trả về là 0 và trong vùng màu sáng giá trị logic trả về là 1.
Lệnh nhận giá trị tín hiệu của mắt trong cảm biến dò đường hai mắt được mô tả như bảng sau:
Hoạt động 2 trang 50 Chuyên đề Tin 10 Kết nối
Lập trình dẫn đường với cảm biến dò đường hai mắt.
Đọc, thảo luận cách thức dẫn đường tự động cho robot với cảm biến dò đường hai mắt.
Lời giải:
Cảm biến dò đường dùng để phân biệt bề mặt sáng hay tối, vì thế đường mà cảm biến đi qua cần phải tuân thủ các nguyên tắc sau:
- Độ rộng của đường phải rộng khoảng cách giữa hai mắt cạnh nhau của cảm biến.
- Đường phải có màu tương phản với phần xung quanh của đường, ví dụ đường màu đen thì xung quanh là màu trắng và ngược lại. Do vậy, nên tránh điều khiển dẫn đường cho robot dưới trời nắng chói.
Tương ứng với hai mắt của cảm biến sẽ có 4 trường hợp cần xử lý khi lập trình.
Bảng 11.2. Các trường hợp của cảm biến dò đường hai mắt
|
Trường hợp |
Mắt trái |
Mắt phải |
Xử lí dò đường |
|
Hai mắt tín hiệu cùng nằm ở vùng tối. |
0 |
0 |
Robot cần đi thẳng |
|
Mắt trái nằm trên mặt tối, mắt phải nằm trên vùng sáng. |
0 |
1 |
Robot cần rẽ trái |
|
Mắt trái nằm trên vùng sáng, mắt phải nằm trên vùng tối. |
1 |
0 |
Robot cần rẽ phải |
|
Cả hai mắt đều nằm trên vùng sáng. |
1 |
1 |
Đối với từng trường hợp đường đi cụ thể có thể xử lí một trong các động tác sau: xoay trái, xoay phải, đi lùi để về đường di chuyển hoặc dừng lại để dừng tại điểm kết thúc. |
Câu hỏi trang 52 Chuyên đề Tin 10 Kết nối
Vì sao cảm biến dò đường thường được lắp ghép với robot ở dưới gầm của robot tự hành, ngay sát phía trước?
Lời giải:
Lắp ghép cảm biến dò đường ở dưới gầm robot để phát hiện được bề mặt di chuyển phía dưới và cần lắp gần với mặt đường do cảm biến chỉ phát hiện được bề mặt hay hấp thụ ở khoảng cách gần.
Hoạt động 3 trang 52 Chuyên đề Tin 10 Kết nối
Dẫn đường với cảm biến dò đường 4 mắt.
Đọc, thảo luận nhóm về câu lệnh lập trình cảm biến đò đường bốn mắt và cách thức dẫn đường cho robot với cảm biến bốn mắt.
Lời giải:
* Câu lệnh lập trình cảm biến đò đường bốn mắt:
- Cảm biến dò đường bốn mắt sẽ có tín hiệu được đánh số thứ tự 1,2,3,4 từ trái sang phải theo hướng nhìn của robot.
- Cảm biến dò đường bốn mắt giúp phát hiện được đường di chuyển có ngã ba hoặc ngã tư, do vậy robot có thể dò chính xác hơn.
- Lệnh nhận giá trị tín hiệu của mắt trong cảm biến dò đường bốn mắt cũng tương tự như cảm biến dò đường hai mắt.
* Cách thức dẫn đường cho robot với cảm biến bốn mắt:
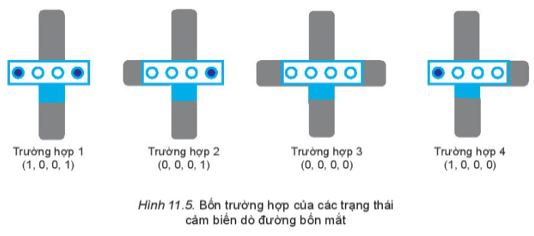
Mỗi mắt của cảm biến dò đường bốn mắt có hai giá trị tín hiệu bằng 0 và bằng 1. Do đó tổng cộng chúng ta có 24 = 16 trường hợp các tổ hợp giá trị tín hiệu từ 4 mắt. Mỗi tổ hợp có dạng (a1, a2, a3, a3, a4) với ak bằng 0 hoặc 1 là giá trị tín hiệu của mắt thứ k trong cảm biến. Hình 11.5 mô tả bốn trường hợp điển hình của trạng thái cảm biến dò đường 4 mắt trên thực địa khi gặp ngã ba, ngã tư.
Ví dụ: (1,0,0,1) tương ứng với trạng thái mắt 2, 3 nằm ở vùng tối, mắt 1 và 4 ở vùng sáng - robot chuyển động theo đường thẳng.
Câu hỏi trang 53 Chuyên đề Tin 10 Kết nối
Em hãy giải thích ý nghĩa của tổ hợp tín hiệu từ cảm biến dò đường 4 mắt trong các trường hợp sau:
a) (0, 1, 1, 1)
b) (1, 1, 1, 0)
Lời giải:
a) Cảm biến bị lệch sang phải, chỉ có mắt số 1 còn nằm trong vùng tối, các mắt 2, 3, 4 nằm trong vùng sáng.
b) Cảm biến bị lệch sang trái, chỉ có mắt số 4 là còn nằm trong vùng tối, các mắt 1, 2, 3 nằm trong vùng sáng.
Luyện tập 1 trang 53 Chuyên đề Tin 10 Kết nối
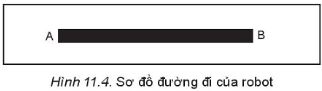
Em hãy viết chương trình điều khiển robot đi từ vị trí A đến vị trí B (trong sa bàn ở Hình 11.4) thì dừng lại.
Lời giải:
Chương trình có thể như sau:
Khởi động chương trình
forever
if Tín hiệu dò đường (“trái”, cổng)=0 and Tín hiệu dò đường (“phải”, cổng)=0
Đi thẳng (100)
if Tín hiệu dò đường (“trái”, cổng)=0 and Tín hiệu dò đường (“phải”, cổng)=1
Xoay trái (70)
if Tín hiệu dò đường (“trái”, cổng)=1 and Tín hiệu dò đường (“phải”, cổng)=0
Xoay phải (70)
if Tín hiệu dò đường (“trái”, cổng)=1 and Tín hiệu dò đường (“phải”, cổng)=1
Dừng lại
Luyện tập 2 trang 53 Chuyên đề Tin 10 Kết nối
Em hãy viết đoạn chương trình robot dò đường trong trường hợp tổ hợp tín hiệu từ cảm biến dò đường là (0,0,0,1) gặp ngã ba robot rẽ trái.
Lời giải:
Chương trình có thể như sau:
Khởi động chương trình
forever
if Tín hiệu dò đường (1, cổng)=0 and Tín hiệu dò đường (2, cổng)=0 and
Tín hiệu dò đường (3, cổng)=0 and Tín hiệu dò đường (4, cổng)=1
Xoay trái (70)
Luyện tập 3 trang 53 Chuyên đề Tin 10 Kết nối
Em hãy viết chương trình sử dụng câu lệnh cảm biến dò đường hai mắt cho trường hợp: khi robot đi hết phần đường màu đen và gặp phần đường màu trắng thì quay đầu lại.
Lời giải:
Khởi động chương trình
forever
if Tín hiệu dò đường (“trái”, cổng)=0 and Tín hiệu dò đường (“phải”, cổng)=0
Đi thẳng (100)
if Tín hiệu dò đường (“trái”, cổng)=0 and Tín hiệu dò đường (“phải”, cổng)=1
Xoay trái (70)
if Tín hiệu dò đường (“trái”, cổng)=1 and Tín hiệu dò đường (“phải”, cổng)=0
Xoay phải (70)
if Tín hiệu dò đường (“trái”, cổng)=1 and Tín hiệu dò đường (“phải”, cổng)=1
Xoay trái (70)
Luyện tập 4 trang 53 Chuyên đề Tin 10 Kết nối
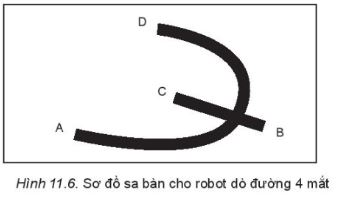
Em hãy viết chương trình điều khiển robot dò đường, đi từ điểm A đến vị trí B thì rẽ trái, đi đến C thì dừng lại (Hình 11.6). Robot có trang bị cảm biến dò đường bốn mắt.
Lời giải:
Khởi động chương trình
forever
if Tín hiệu dò đường (2, cổng)=0 and Tín hiệu dò đường (3, cổng)=1
Xoay trái (70)
if Tín hiệu dò đường (2, cổng)=1 and Tín hiệu dò đường (3, cổng)=0
Xoay phải (70)
if Tín hiệu dò đường (2, cổng)=0 and Tín hiệu dò đường (3, cổng)=0
if Tín hiệu dò đường (1, cổng)=1 and Tín hiệu dò đường (4, cổng)=1
Đi thẳng (100)
if Tín hiệu dò đường (1, cổng)=0 and Tín hiệu dò đường (4, cổng)=0
Xoay trái (70)
if Tín hiệu dò đường (2, cổng)=1 and Tín hiệu dò đường (3, cổng)=1
Dừng lại
Vận dụng 1 trang 53 Chuyên đề Tin 10 Kết nối
Em hãy tìm cách thay đổi các câu lệnh của chương trình dò đường ở Mục 2 sao cho robot vẫn di chuyển đúng như chương trình hiện có.
Lời giải:
Em có thể thay đổi thứ tự các câu lệnh if trong chương trình hoặc thay đổi cách xử lý của các trường hợp “if Tín hiệu dò đường (“trái”, cổng)=1 and Tín hiệu dò đường (“phải”, cổng)=1 thay vì “Xoay phải (70)” thì có thể “Xoay trái (70) hoặc “Dừng lại”.
Vận dụng 2 trang 53 Chuyên đề Tin 10 Kết nối
Em hãy tìm hiểu thêm thông tin về một số robot hiện nay ở Việt Nam trên Internet.
Lời giải:
Các robot ứng dụng dò đường trong cuộc sống như:
- Robot tự động lau nhà được thương mại trên thị trường.
- Robot vận chuyển hàng hóa hay được biết đến là xe tự hành. Đây là robot được vận hành rất nhiều trong các khu công nghiệp lớn với nhiệm vụ phân phối và vận chuyển hàng hóa một cách tự động.

