Hàm số lượng giác
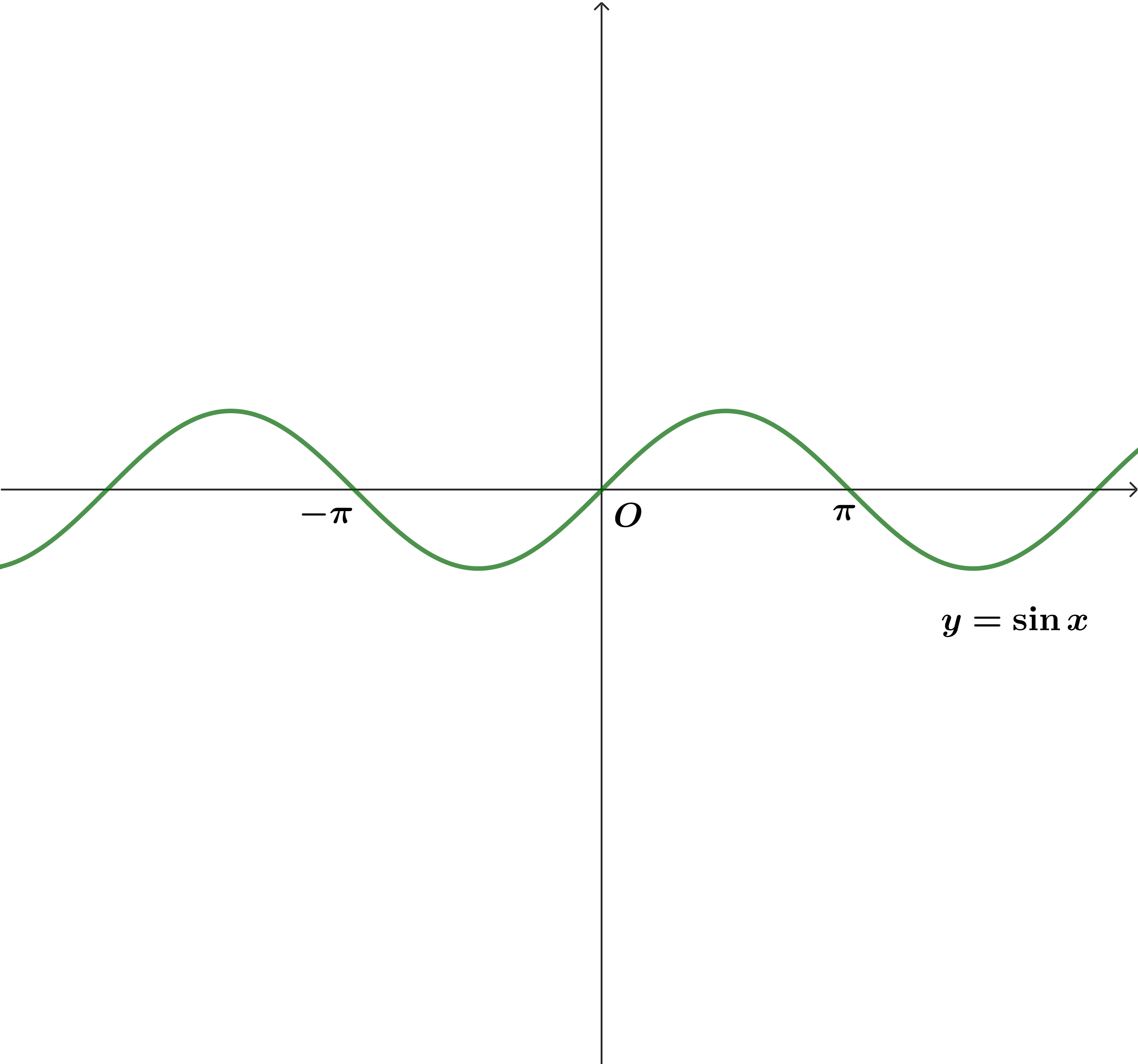
1. Hàm số sin
Quy tắc đặt tương ứng với mỗi số thực ![]() \(x\) với số thực
\(x\) với số thực ![]() \(\sin x\)
\(\sin x\)
![]() \(\begin{matrix}
\sin x:\mathbb{R} \to \mathbb{R} \hfill \\
{\text{ }}x \mapsto y = \sin x \hfill \\
\end{matrix}\)
\(\begin{matrix}
\sin x:\mathbb{R} \to \mathbb{R} \hfill \\
{\text{ }}x \mapsto y = \sin x \hfill \\
\end{matrix}\)
Được gọi là hàm số sin, kí hiệu là ![]() \(y= \sin x\). Tập xác định của hàm số là
\(y= \sin x\). Tập xác định của hàm số là ![]() \(D=\mathbb{R}\).
\(D=\mathbb{R}\).
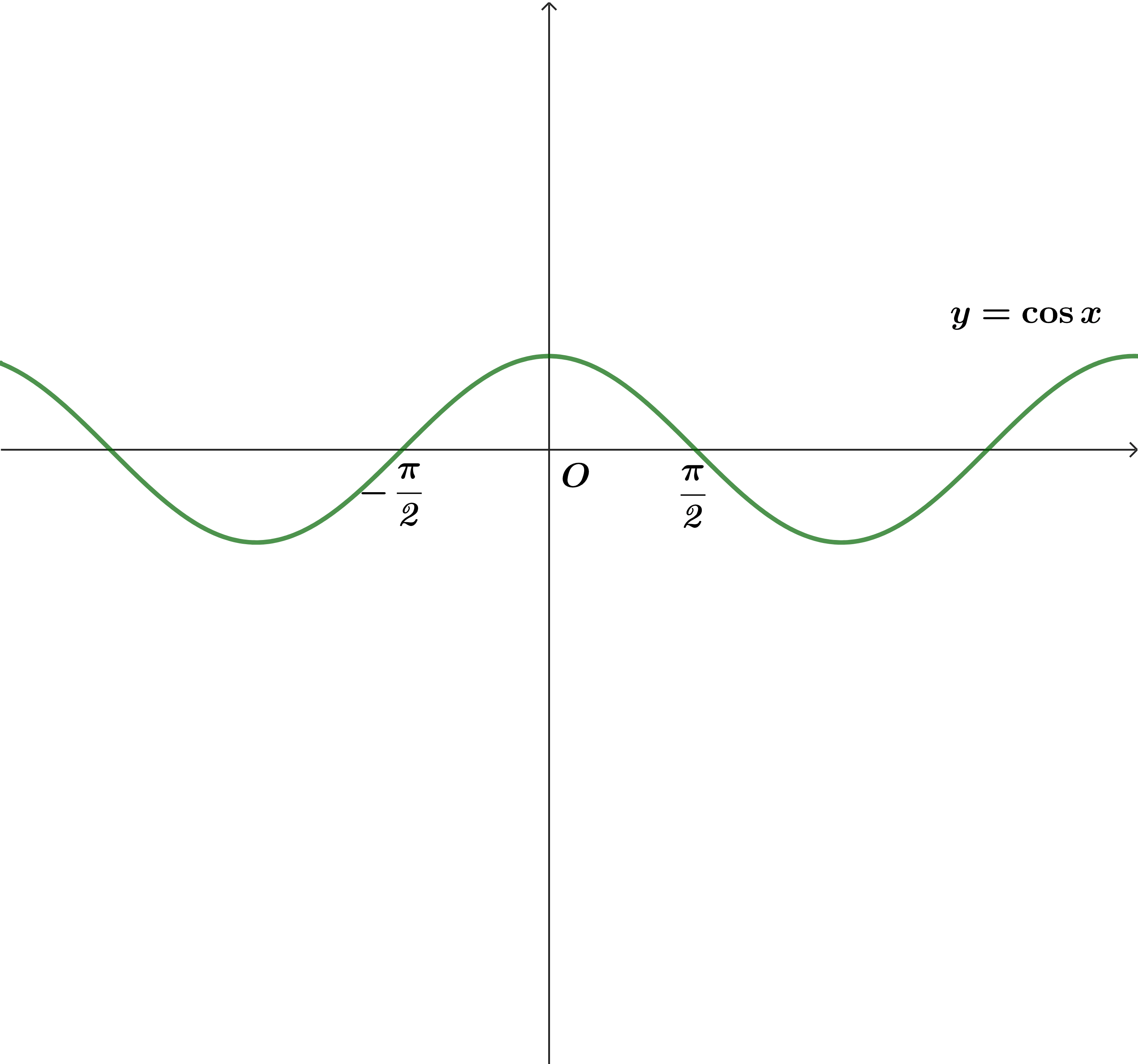
2. Hàm số côsin
Quy tắc đặt tương ứng với mỗi số thực ![]() \(x\) với số thực
\(x\) với số thực ![]() \(\cos x\)
\(\cos x\)
![]() \(\begin{matrix} \cos x:\mathbb{R} \to \mathbb{R} \hfill \\ {\text{ }}x \mapsto y = \cos x \hfill \\ \end{matrix}\)
\(\begin{matrix} \cos x:\mathbb{R} \to \mathbb{R} \hfill \\ {\text{ }}x \mapsto y = \cos x \hfill \\ \end{matrix}\)
Được gọi là hàm số cosin, kí hiệu là ![]() \(y= \cos x\). Tập xác định của hàm số là
\(y= \cos x\). Tập xác định của hàm số là ![]() \(D=\mathbb{R}\).
\(D=\mathbb{R}\).
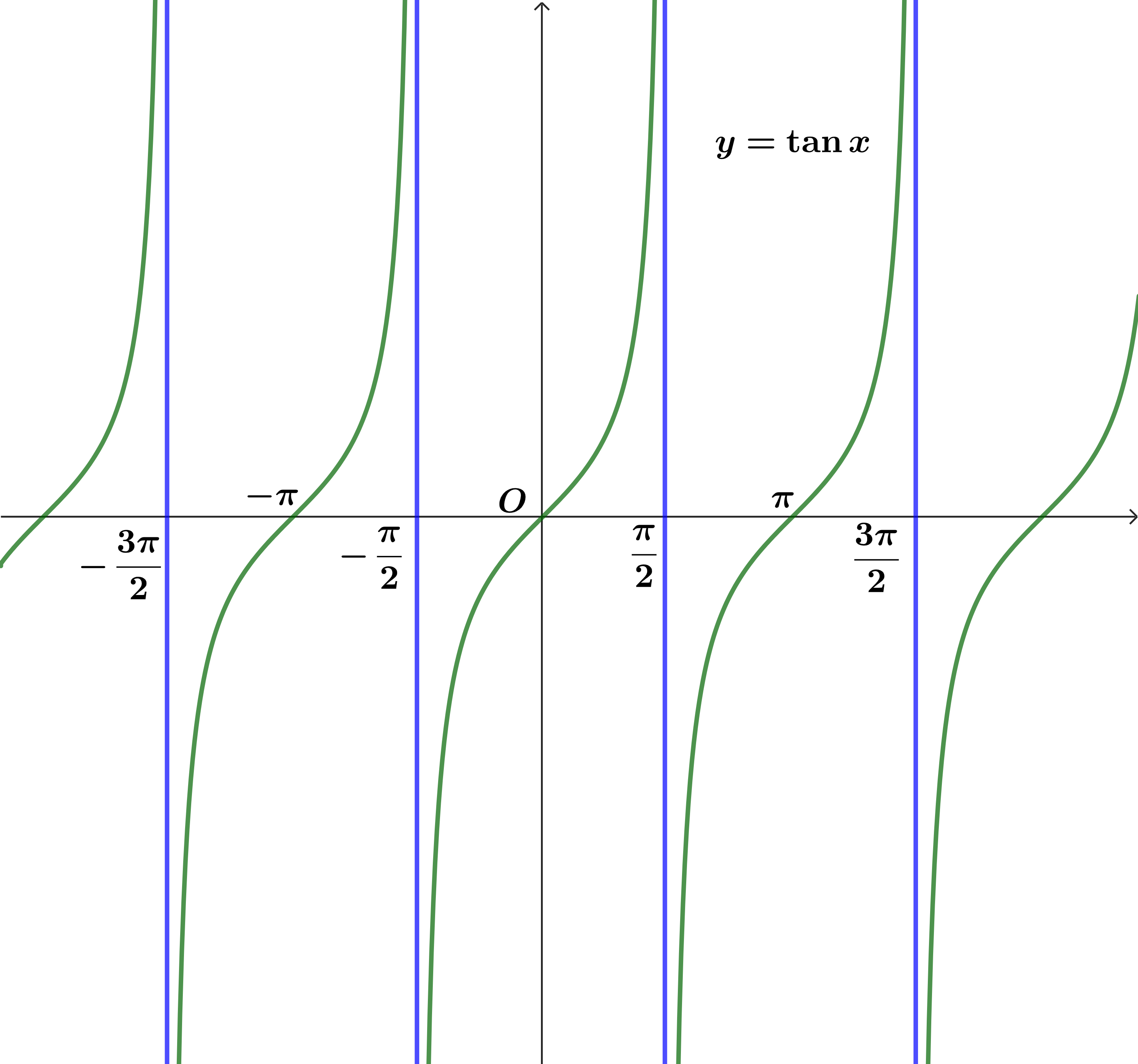
3. Hàm số tan
Hàm số tan là hàm số được xác định bởi công thức ![]() \(y = \frac{{\sin x}}{{\cos x}};\left( {\cos x \ne 0} \right)\), kí hiệu là
\(y = \frac{{\sin x}}{{\cos x}};\left( {\cos x \ne 0} \right)\), kí hiệu là ![]() \(y= \tan x\).
\(y= \tan x\).
Tập xác định của hàm số ![]() \(y= \tan x\) là
\(y= \tan x\) là ![]() \(D=\mathbb{R}\backslash \left\{ \frac{\pi }{2}+k\pi ,k\in \mathbb{Z} \right\}\)
\(D=\mathbb{R}\backslash \left\{ \frac{\pi }{2}+k\pi ,k\in \mathbb{Z} \right\}\)
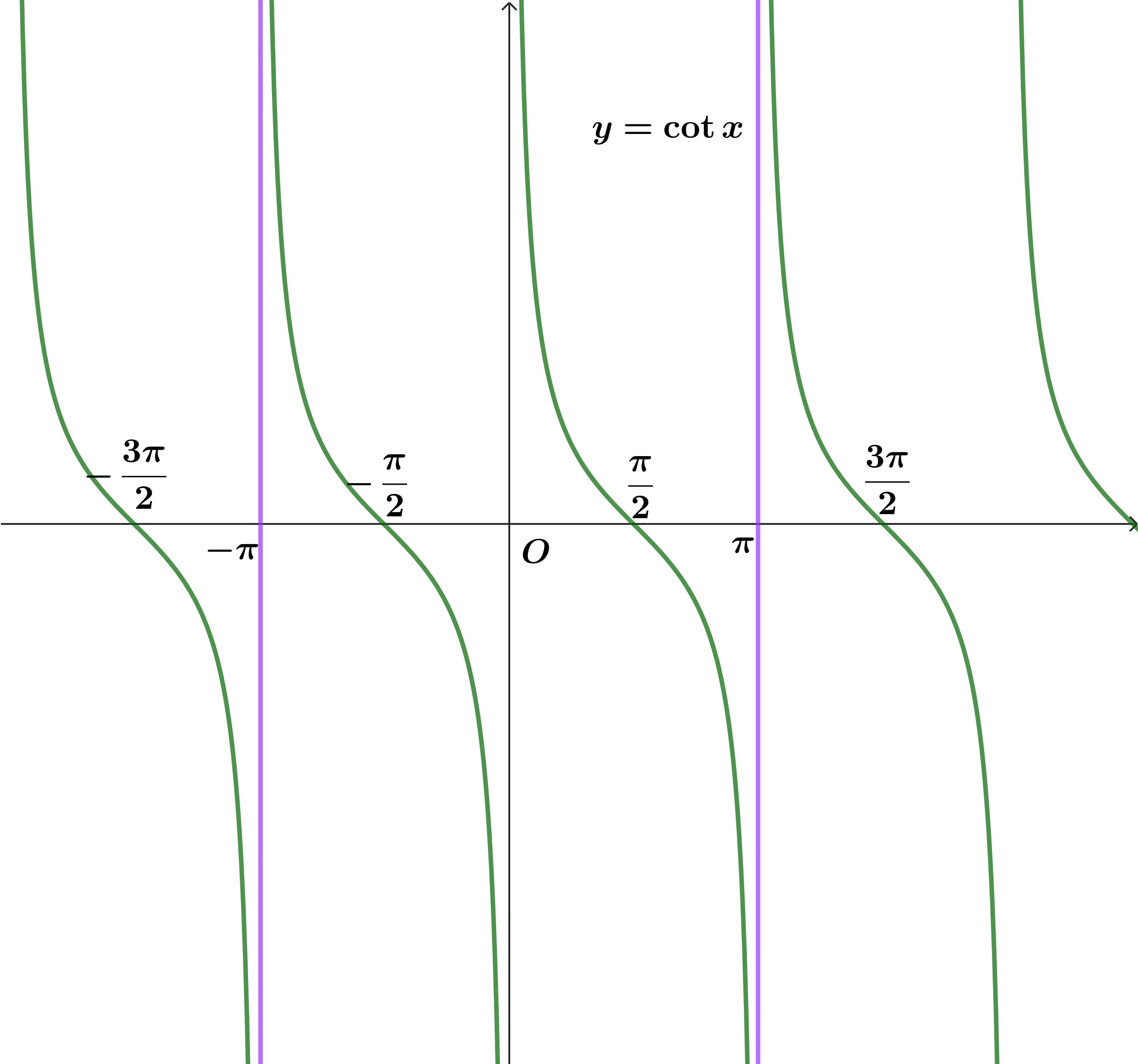
4. Hàm số cotan
Hàm số cotan là hàm số được xác định bởi công thức ![]() \(y = \frac{{\cos x}}{{\sin x}};\left( {\sin x \ne 0} \right)\), kí hiệu là
\(y = \frac{{\cos x}}{{\sin x}};\left( {\sin x \ne 0} \right)\), kí hiệu là ![]() \(y= \cot x\).
\(y= \cot x\).
Tập xác định của hàm số ![]() \(y= \cot x\) là
\(y= \cot x\) là ![]() \(D=\mathbb{R}\backslash \left\{ k\pi ,k\in \mathbb{Z} \right\}\)
\(D=\mathbb{R}\backslash \left\{ k\pi ,k\in \mathbb{Z} \right\}\)
B. Tính tuần hoàn của hàm số lượng giác
Định nghĩa
Hàm số ![]() \(y=f(x)\) có tập xác định
\(y=f(x)\) có tập xác định ![]() \(D\) được gọi là hàm số tuần hoán, nếu tồn tại một số
\(D\) được gọi là hàm số tuần hoán, nếu tồn tại một số ![]() \(T \ne 0\) sao cho với mọi
\(T \ne 0\) sao cho với mọi ![]() \(x \in D\) ta có:
\(x \in D\) ta có:
 \(x - T \in D\) và \(x + T \in D\)
\(x - T \in D\) và \(x + T \in D\)- \(f(x+T)=f(x)\)
Số dương ![]() \(T\) nhỏ nhất thỏa mãn các tính chất trên được gọi là chu kì của hàm số tuần hoàn đó.
\(T\) nhỏ nhất thỏa mãn các tính chất trên được gọi là chu kì của hàm số tuần hoàn đó.
Người ta chứng minh được rằng:
- Hàm số \(y= \sin x\) tuần hoàn với chu kì \(T = 2\pi\)
- Hàm số \(y= \cos x\) tuần hoàn với chu kì \(T = 2\pi\)
- Hàm số \(y= \tan x\) tuần hoàn với chu kì \(T = \pi\)
- Hàm số \(y= \cot x\) tuần hoàn với chu kì \(T = \pi\)
Chú ý
- Hàm số \(y = \sin \left( {ax + b} \right)\) tuần hoàn với chu kì \(T = \frac{{2\pi }}{{\left| a \right|}}\)
- Hàm số \(y = \cos \left( {ax + b} \right)\) tuần hoàn với chu kì \(T = \frac{{2\pi }}{{\left| a \right|}}\)
- Hàm số \(y = \tan \left( {ax + b} \right)\) tuần hoàn với chu kì \(T = \frac{{\pi }}{{\left| a \right|}}\)
- Hàm số \(y = \cot \left( {ax + b} \right)\) tuần hoàn với chu kì \(T = \frac{{\pi }}{{\left| a \right|}}\)
Đặc biệt
a) Hàm số ![]() \(y = a\sin mx + b\cos nx + c,\left( {m,n \in \mathbb{Z}} \right)\) là hàm số tuần hoàn với chu kì
\(y = a\sin mx + b\cos nx + c,\left( {m,n \in \mathbb{Z}} \right)\) là hàm số tuần hoàn với chu kì ![]() \(T = \frac{{2\pi }}{{\left( {m,n} \right)}}\) với (m, n) là ước chung lớn nhất.
\(T = \frac{{2\pi }}{{\left( {m,n} \right)}}\) với (m, n) là ước chung lớn nhất.
b) Hàm số ![]() \(y = a\tan mx + b\cot nx + c,\left( {m,n \in \mathbb{Z}} \right)\) là hàm số tuần hoàn với chu kì
\(y = a\tan mx + b\cot nx + c,\left( {m,n \in \mathbb{Z}} \right)\) là hàm số tuần hoàn với chu kì ![]() \(T = \frac{\pi }{{\left( {m,n} \right)}}\) với (m, n) là ước chung lớn nhất.
\(T = \frac{\pi }{{\left( {m,n} \right)}}\) với (m, n) là ước chung lớn nhất.
C. Sự biến thiên và đồ thị của hàm số lượng giác
1. Hàm số sin
- Tập xác định \(D=\mathbb{R}\) có nghĩa hàm số xác định với mọi \(x \in \mathbb{R}\)
- Tập giá trị \(T \in \left[ { - 1;1} \right]\) có nghĩa là \(- 1 \leqslant \sin x \leqslant 1\)
- Là hàm số tuần hoàn với chu kì \(2\pi\), có nghĩa là \(\sin \left( {x + k2\pi } \right) = \sin x,\left( {k \in \mathbb{Z}} \right)\)
- Hàm số nghịch biến trên mỗi khoảng \(\left( {\frac{\pi }{2} + k2\pi ;\frac{{3\pi }}{2} + k2\pi } \right)\) và đồng biến trên mỗi khoảng \(\left( { - \frac{\pi }{2} + k2\pi ;\frac{\pi }{2} + k2\pi } \right)\)
- Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ \(O\) là tâm đối xứng.
2. Hàm số côsin
- Tập xác định \(D=\mathbb{R}\) có nghĩa hàm số xác định với mọi \(x \in \mathbb{R}\)
- Tập giá trị \(T \in \left[ { - 1;1} \right]\) có nghĩa là \(- 1 \leqslant \cos x \leqslant 1\)
- Là hàm số tuần hoàn với chu kì \(2\pi\), có nghĩa là \(\cos \left( {x + k2\pi } \right) = \cos x,\left( {k \in \mathbb{Z}} \right)\)
- Hàm số nghịch biến trên mỗi khoảng \(\left( {k2\pi ;\pi + k2\pi } \right)\) và đồng biến trên mỗi khoảng \(\left( { - \pi + k2\pi ;k2\pi } \right)\)
- Là hàm số chẵn nên đồ thị hàm số nhận trục tung là trục đối xứng.
3. Hàm số tan
- Tập xác định \(D=\mathbb{R}\backslash \left\{ \frac{\pi }{2}+k\pi ,k\in \mathbb{Z} \right\}\)
- Tập giá trị \(T = \mathbb{R}\)
- Là hàm số tuần hoàn với chu kì \(\pi\), có nghĩa là \(\tan \left( {x + k\pi } \right) = \tan x,\left( {k \in \mathbb{Z}} \right)\)
- Hàm số đồng biến trên mỗi khoảng \(\left( { - \frac{\pi }{2} + k\pi ;\frac{\pi }{2} + k\pi } \right)\)
- Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ \(O\) là tâm đối xứng.
4. Hàm số cotan
- Tập xác định \(D=\mathbb{R}\backslash \left\{ k\pi ,k\in \mathbb{Z} \right\}\)
- Tập giá trị \(T = \mathbb{R}\)
- Là hàm số tuần hoàn với chu kì \(\pi\), có nghĩa là \(\cot \left( {x + k\pi } \right) = \cot x,\left( {k \in \mathbb{Z}} \right)\)
- Hàm số đồng biến trên mỗi khoảng \(\left( { k\pi ;\pi + k\pi } \right)\)
- Là hàm số lẻ nên đồ thị hàm số nhận gốc tọa độ \(O\) là tâm đối xứng.